MR6 patrol robot

MR6 patrol robot is mainly used in remote control inspection of indoor places, such as automation workshop, high risk workshop, and bad environment workshop, and robot timing automatic inspection. Depending on the precision high efficiency sensors such as the lidar, the MR6 can locate and autonomously move the navigation function, automatically walk to the specified position, automatically recognize and record the various instrument and state indicator on the machine equipment near the position, by identifying the instrument readings and the color state of various state indicator lights. Automatically determine whether the operation of the current equipment is normal. And according to the alarm conditions set by the user ahead of time, real-time messages and scene video can be sent to the designated person immediately when the readings are found or the color of the indicator is abnormal. For the MR6 robot carrying the FLIR infrared thermal imager, the temperature distribution of the current machine can be measured remotely and without contact. If the M33 patrol robot discovers the abnormal temperature, it will also send the real time message and the scene picture to the designated manager.
With SLAM and auto charging dock station, MR6 can auto move to charging when battery power is low, so it can do 7x24 hours all day all night woking
MR6 patrol robot specification:
| Basic Functions | Self navigation/ device monitoring/ vision surveillance/ timing patrol/ auto-charging/ report generation |
| Recommended application | Workshop, power switching room and similar indoor patrol inspection. |
| Size and weight | Height:150CM, Base size:53X48CM,Net weight:40KG(include 20Ah 24V VRLA battery) |
| Localization & Navigation | The 2D laser radar is used to scan the object position information around the robot to realize SLMA. |
| Motors & driving | Two wheel differential drive, Integrated 2X150 hub-wheel motor, high efficiency and low noise. |
| Optical Video Capture | Standard 2M pixel UVC protocol HD USB camera, the image quality can reach 1920X1080 pixels. |
| Infrared thermal image | Optional FLIR AX8 infrared thermal imager. Temperature range is -10 to 150 degrees Celsius. |
| Main hardware | The main board is industrial PC, CPU is core I5 processor, 4G RAM, auxiliary board is ARM arch. |
| Robot software system | Main O/S is LINUX, with ROS Kinetic to communicate and cooperate with each function modules. |
| Vision AI algorithm | AI recognition algorithm based on OPENCV and machine learning algorithm. |
| Remote Communication | Based on P2P peer to peer communication architecture, which is suitable for LAN and WAN. |
| Client Software | Provide client monitoring software, PC O/S is WIN7 or above; provide SDK for customer development. |
| Robot motion features | Cruising speed is 0.2 to 0.8 m/sec, maximum climbing angle is 10 degrees, and turning radius is 0.25m. |
| Camera platform moving | Horizontal rotation angle: -180 to +180 degrees, pitch rotation angle: -40 to +40 degrees. |
| Obstacle Avoidance | Laser radar scanning, ultrasonic detection and mechanical anti-collision switch three safe. |
| Battery Specification | The built-in battery is 24V20AH VRLA type. |
| Automatic Charging | After the task is completed, will automatically back to charging station to supply energy. |
| Maximum walking distance | For a fully charged robot, it can walk continuously up to 3000M. |
| MR6 VIEW |  |
| MR6 Client UI | 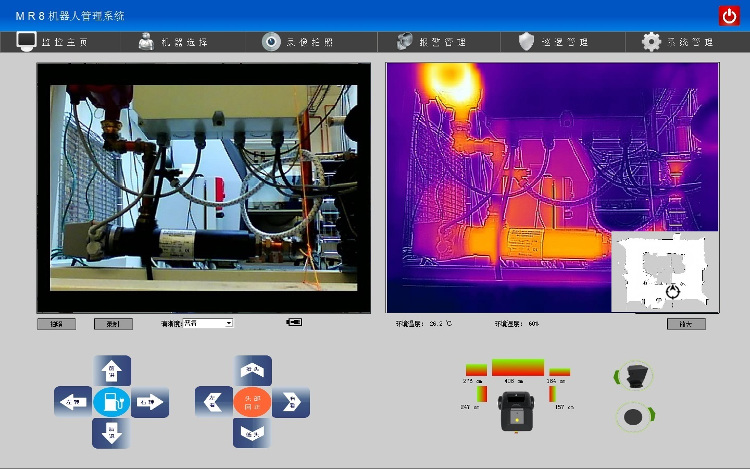 |
 Home
Home Tel
Tel QQ
QQ 中文版
中文版